��Ƶ����˫����ʽ���ػ��ϵ�Ӧ��
1������
��ʽ���ػ��ǹ�����ҵ��ʹ��ʮ�ֹ㷺��һ��װж�豸��������ʽ���ػ��Ĺ����������ӣ�������Ҫ��������Ƶ�����ƶ�������ת�����ٵȲ���������������������ڴ�ͳ�ļ̵���-�Ӵ������Ƶĵ���ϵͳ�У��Ӵ����Ĵ�ͷ���������г���������ջ������ά������ά���ɱ����ߣ����������ͣ����ʧ���Ӳ��ɹ������Ҵ�ͳ�����ػ�����ϵͳ���ۺϼ���ָ��ϲ�Ѳ������㹤ҵ������Ҫ���������ܸߡ������ɿ���ά������Ľ�����Ƶ����ϵͳΪ��ʽ���ػ��Ŀ����ṩ��һ��ȫ�µķ������÷���������·�������ȶ���ά����С�������������ƣ��Ҹ�Ч�����ܣ���˲��ý�����Ƶ���������ػ��������ټ�����չ��������
2.��ʽ���ػ��Ľṹ������
��ʽ���ػ���һ�ֺ���ڹ̶�����Ͽ��������˸���������豸��һ��������С�����żܽ����ṹ���ż����л����������л������Լ����������豸���ĸ�������ɡ���������С�����������л�����С�����л�����ɡ��ڵ�������ϵͳ�У��乩��һ����ͨ��С������װ�ã��������ߣ������ػ��ܵ�Դ����װ�ã������ߣ��Ȳ��ֽ���Դ���͵����ĵ����ϡ�
��ʽ���ػ�����ʵ����������ά�ռ�Ĵ�ֱ�����������˶���ͨ�����綯�������س������ߵĹ��������ǰ���˶���С��������������С���綯���������ż��ϵĹ�������������˶�������������ʱ�����ص綯����������ֱ�����˶�����ͼ1��ʾ
ͼ1 ��ʽ���ػ�����Ҫ�ṹ���˶���ʽ
��ͳ����ʽ���ػ�һ����ü̵���-�Ӵ������ƣ����Ϊ��������ʽ�綯��������ת�Ӵ�����ķ��������͵��٣���ͼ2��ʾ������ʱ�����Ӵ������߽��Ӵ������ϣ�����ƶ����Ӵ������ϴ�բ�����ٵ����ϵĽӴ������������������ת��������Ҫ����ʱͨ�����ϵ��ٵ����ϵIJ�ͬ�Ӵ������ı�ת����Ȧ�ĵ���ֵ���ﵽ�ı�����ת�١�������Ʒ�ʽȱ�����ԣ���Ҫ��ӳ��Ч�ʷdz��ͣ���������ת��ʵ���������ȡת�ٵĽ��͡�ת��Խ����Ч��Խ�ͣ��ֹ��ʱ�ת�������ܶ����ĵ������ñ�Ƶ���ٷ������ܺܺõؽ��������⡣��Ƶ������ͨ���ı䶨�ӹ���Ƶ�����ﵽ������ٵ�Ŀ�ģ�����ת�ٸߵͣ����е���Ի���������Ȼ��е����ƽ�У������ĵ�ת��ʶ��������䣬���Ч�ʺܸߣ��������ԵĽڵ�Ч�����ҵ��ٵ�ƽ���Դ����ߡ��ڽ��ܡ�����ά�ޡ���߲�Ʒ��������Ʒ�����ȷ��涼ȡ�������Եľ���Ч�棬�ǵ�����ٵķ�չ��������������
ͼ2 ������������ͼ
3.��Ƶ����ϵͳѡ�ͷ���
���ŵ������Ӽ����ķ�չ����Ƶ�������ܺ��ȶ��Եõ��˼������ߣ�ʹ�����ػ������ñ�Ƶ����Ϊ�˿��ܣ��Ӷ������Ͻ���˴�ͳ��ʽ���ػ����ϵͳ��ȱ�㡣�������豸��ʹ�ñ�Ƶ���ٿ��Ʊ������˽����ػ������л����Դ���ϵͳ��Ҫ��
��1����Ƶ�������ػ��������������е���������Ϊ���������ش���2���ת�أ������������ڰ����ʱ���������رȶת�ش�ö࣬�ڵ�Ƶʱ���������100%���϶ת�ء�
��2������ƽ�ȣ��Ӽ���ƽ����������ֹͣʱ��Ƶ��������ƶ������ƶ�ת�ر���ƽ�����ɣ����ﹳ���������ڼӼ��ٹ����п��������ٶ���������ײ���С�
��3�������������л����ͣ���Լ���С�����л���������ʱ����Ƶ���ܸ������ڶת�ص��ƶ����أ����ҵ�������ڷ���״̬�����Ƶ��������������ʱ�����ܽ��ⲿ������������������
��4�����й��������ڵ��첻ƽ�����Ͳż�����ָ�˿���������Լ������뿪��Ӵ�����ʱ�����������ص����䣬��Ƶ���ܳ����������䲢����ƽ�����ơ�
����������ػ��Ա�Ƶ��������Ҫ��Ƶ����ϵͳ����Ҫ�豸���������·���ѡ��
3.1 ��Ƶ��������ѡ��
3.1.1 ������������/�� ����������Ƶ��������P0��kVA����
P0��K��K1��Pm/(�ǡ�cos��) ��1��
ʽ�� Pm�D������Ҫ��ĵ綯�����������ʣ�kW����
K�D�������ε�����ϵ����һ��Ϊ1.05 ~1.1����
K1�D��������ϵ����һ��ȡ1.1~1.2����
�ǨD�綯��Ч�ʣ�ͨ��Լ0.85����
cos�ըD�綯���Ĺ������أ�ͨ��Լ0.75����
3.1.2ƽ�ƻ���������С���أ�����ת�����������ö�̨������������������Ƶ������һ�϶���ʽ����Ƶ����������������ܸ�������ĵ�����
ICN��k��n��In ��2��
ʽ�� k�D������������ϵ����PWM����ʱȡ1.05~1.1��
In�D��Ƶʱ��̨�綯������������A����
ICN�D��Ƶ������������A����
n�D�綯����������
3.2 �ƶ���Ԫ���ƶ������ѡ��
3.2.1ƽ�ƻ����ƶ���Ԫ���ƶ������ѡ��
ƽ�ƻ��������ϵ��ƶ���Ԫ���ƶ�����һ�㰴�����Ƶ�����ƶ���Ԫ���ƶ�����ı����ý���ѡ��
3.2.2���������ƶ���Ԫ���ƶ������ѡ��
�����������½���������������������ʱ�䳤��Ϊ��֤��Ƶ���������������������ƶ���Ԫ���ƶ����衣
��1������ֵRB �ļ���
RB����С����ֵRmin�ɱ�Ƶ����������ֵI(max)���ƶ���Ԫ��������������
Rmin= VC /I(max) ��3��
Ϊ�����ƶ����ص�Ҫ��������ֵRmax������ƶ�����PB(max)��ã�
Rmax=V2C / PB(max)= V2C /��130%��Pe�� ��4��
�����ȡֵ��Χ��
Rmin��RB��Rmax ��5��
ʽ�� VCһ��Ϊ700V
Pe�D��������
��2����������PR
PR��0.8 Pe/m ��6��
ʽ�� m�D����Ĺ��������ʣ��ɵ����ѡ���ֲ�鵽��һ�㰴1.5���㡣
4.��Ƶ����ϵͳ���
4.1 ��Ƶ����ϵͳ�ĵ������
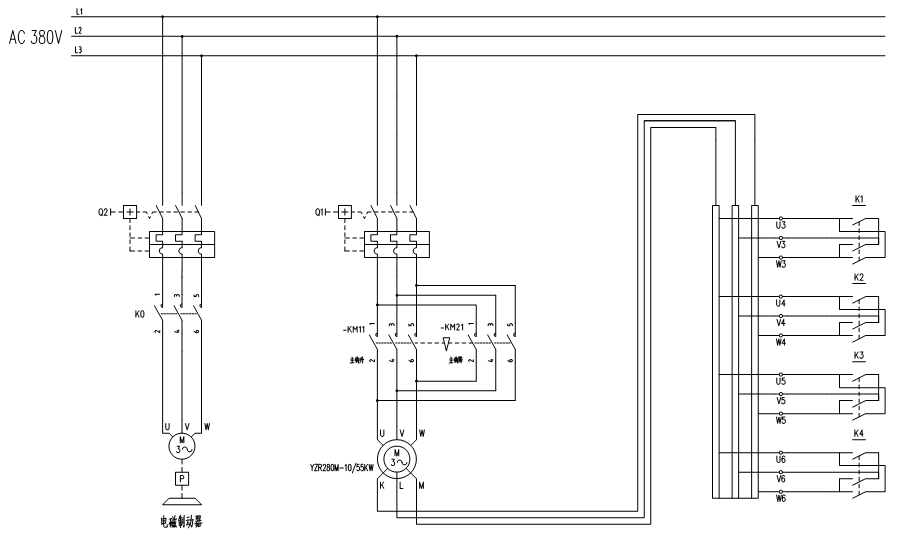
���Խ�������ij��ѹ����50T˫����ʽ���ػ�����������Ƶ����Ϊ������ϸ˵�����ػ���Ƶ���ٵ���Ʋ��衣�����ػ�������������������õ���YZR315S-10 �ĵ��������Ϊ55KW������ʽ��1���������������õ�������������ı�Ƶ������Ϊ95KVA���ֲ����ķ�����������������ʸ����Ƶ��A510-4T0750��Ƶ�����ñ�Ƶ������Ϊ98KVA���Ҿ��г�ǿ�Ĺ������������������Լ����ֵ��ͺ������һ��������ã����õ������˲����͵翹��������г������ǿ�˿����ţ���˷dz��ʺ����ػ����������Ĺ���Ӧ�ã��ƶ��������ʽ��3������6����á����������ͼ3��ʾ�����ڲ���Ҫ��������٣����Ҫ�������ת�Ӷ̽ӣ� K1��K2Ϊ��ת��ת�źţ�K3��K4��K5Ϊ����ٿ����źţ�����ƶ��Ӵ������Ƶ���ƶ����ı�բ������
ͼ3����������Ƶ���Ƶ������ͼ
���Բ�������
����������������²�����
F2.0.00=55 ��������
F2.0.01=380 ������ѹ
F2.0.02=123.3 ��������
F2.0.03=50 ����Ƶ��
F2.0.04=580 ����ת��
����F2.2.53=1��Ȼ�������м�FWD����Ƶ�������е������ʶ��ʶ��������²������ñ�Ƶ��
F0.1.22=3.5 ����Ƶ������Ϊ3.5HZ
F0.2.29=10 ����һ��Ƶ��
F0.3.33=1 ������������Ϊ�ⲿ���ӿ���
F1.0.03=8 ����ʱ������Ϊ8S
F1.0.04=3 ����ʱ������Ϊ3S
F1.1.13=4 �ز�Ƶ������Ϊ4K
F1.4.39=200% �Ӽ��ٵ�������ˮƽ
F1.4.42=0011 ��Ƶ�������������ܹر�
F3.0.00=1 DI1����Ϊ����ٿ���1
F3.0.01=2 DI2����Ϊ����ٿ���2
F3.0.02=3 DI3����Ϊ����ٿ���3
F3.0.03=7 DI4����Ϊ��ת
F3.0.04=8 DI5����Ϊ��ת
F3.0.05=13 DI6����Ϊ���ϸ�λ
F3.1.12=6 DO1��������������
F3.1.21=71 TA-TC�������Ϊ��բ���
F3.1.27=0 �����1��ر�������Ϊ���Ƶ��
F3.1.28=0 �����2��ر�������Ϊ���Ƶ��
F3.1.30=6.5 �����1����ֵ����Ϊ6.5%��3.25HZ��
F3.1.31=6.5 �����1����ֵ����Ϊ6.5%��3.25HZ��
F3.1.32=13 �����2����ֵ����Ϊ13%��6.5HZ��
F3.1.33=13 �����2����ֵ����Ϊ13%��6.5HZ��
F5.3.29=1 ����Ƶ������ģʽΪ��������Ƶ��ʱ�������Ƶ��
F6.0.00=20 ��������Ƶ��
F6.0.01=30 ��������Ƶ��
F6.0.02=40 ��������Ƶ��
F6.0.06=50 ��������Ƶ��
FF.0.00=0001 ������FF�����
FF.0.01=14 SDO1Ϊ�������й�����
FF.0.03=64 ��SDO1ȡ�� ���Ǽ��ٹ�����
FF.0.04=27 ѡ������1
FF.0.05=14 ���ٹ�����
FF.0.06=30 ѡ������2
FF.0.07=67 ��SDO3��SDO4���뼴�Ǽ��ٹ����м����1��Ч��
FF.0.08=68 ��SDO5��SDO6���뼴���ٹ����м����2��Ч��
4.2���ػ���Ƶ����ϵͳ�Ŀ���Ҫ��
��ʽ���ػ�����ϵͳ�У���С��һ����һ̨��Ƶ������̨�������˱�Ƶ������U/F���Ʒ�ʽ������������Ϊһ��һ���ƣ�Ϊ������õ����ܲ�����ʸ������ģʽ��Ϊʹ���ػ���������ֹͣʱ��ʹ����ƶ������Ƶ�����ת��ƽ�����ɣ���������õ�ű�բʱ������ƶ�����բ����բ˲�䣬���ײ����ﹳ������ƽ�����ɡ�Ҫ������������Ҫ�ӱ�Ƶ������ʱ���ƶ������������ʱ�������֣��������ػ������������ƶ�����բ���磬�����ﹳ����բ�����������ת����Ƶ���ױ����ϣ�����ͣ�������У�����բ���磬���������Ƶ���ױ����ϣ���բ�������������С�������ﹳ����ˣ�ͨ�����¿���Ҫ����ԺܺõĽ�������⣺
1�����ػ������������еĿ���Ҫ��
ͨ���趨��բƵ�ʼ��ֵ�ͼ�����ʱ�䣬��Ƶ�ʵ�����ֵͬʱ����Ƶ���������������������㹻��ʱ���������������ܵ��������½�����ʱ������բ�źţ�ʹ�ƶ�������������ɿ���բ������ά��ʱ��Ӧ���ڵ��������ʱ�䡣ͬʱ����Ҫ��������������е�ϵ���ϣ��磺��Ƶ���ļӼ���ʱ���Լ�����ƶ������ɵ��ɽ��̶ȵȡ�
2�����ػ���ͣס�����еĿ���Ҫ��
�趨��բƵ�ʼ��ֵ��Ƶ��ά��ʱ�䣨һ������ƶ�������ʱ��0.6S������ͣ��ʱ������Ƶ�����Ƶ�ʵ��ﱧբƵ��ʱ����Ƶ�������բ�ź����ƶ������ƶ���������ϵ籧բ������ʼ����ʱά��һ��ʱ�䣬ֱ����բ������ɣ�Ȼ���Ƶ�����Ƶ�ʽ�Ϊ0Hz�������������ͼ4��ʾ��
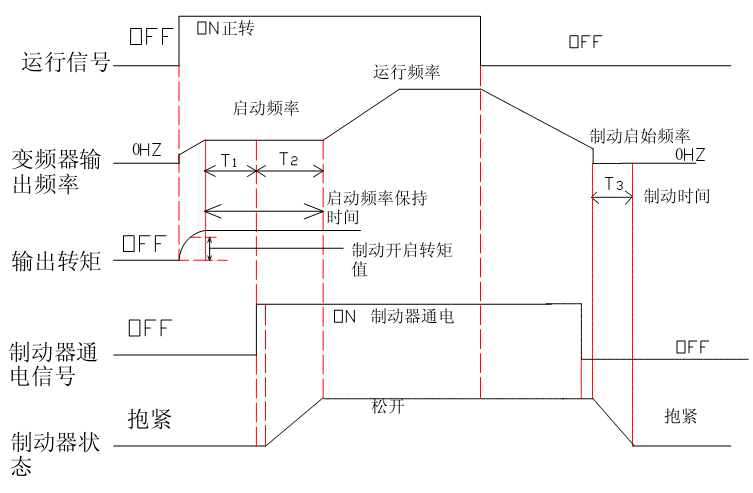
ͼ4 ������е�ƶ�������
5.����
ͨ���������ֳ����ԣ��Լ��ó�ԭ��ϵͳ��ȣ����پ��ȸߣ�����ƽ�ȣ��ӿ���װ���ٶȣ�����˹���Ч�ʣ�ͬʱʵ���˵�Ƶ����������ֹͣ��ʹϵͳ������ֹͣƽ�ȣ������˶Ի�е�����ij����Ҳ�����˶Ե�������Ⱦ��ʹά�����ô�ͣ��ҽ���Ч�������������֤�ı��ķ�������Ч�ԣ��Ϳ����ԡ�